
Abstraction and coordination of networked discrete-event systems
Contact person: Philipp Welz
Period: since 01.03.2016
Abstract: Modern communication technologies facilitate a flexible exchange of information between autonomous systems through a digital communication network. The control objective of these multi-agent systems is to achieve a desired coordinated behaviour of the individual subsystems.
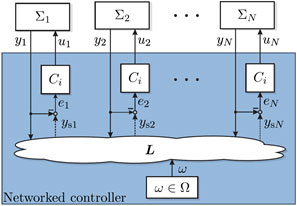
Figure 1: Multi-agent system
Figure 1 shows the structure of a multi-agent system. The physically uncoupled agents ∑i,(i = 1, , N) are connected via a networked controller which consists of local controllers Ci,(i = 1, ,N) and a communication network L.
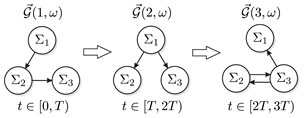
Figure 1: Random communication links
The occurrence of links in the communication network at each discrete point in time is determined by the outcome ω of a random experiment as shown in Figure 2. The focus of this project is to analyse the impact of an unreliable communication network on the coordinated behaviour of the agents.