
Kolloquium Automatisierungstechnik (144 000)
Übersicht SS 2019
- Dienstag, 30. April 2019, 15:00 Uhr, ID 2/553
Marcel Wallner, B.Sc. (Masterarbeit - ATP, RUB)
Kooperation vernetzter Systeme zur Kompensation von Aktorausfällen - Dienstag, 07. Mai 2019, 15:00 Uhr, ID 03/401
Thomas Mutzke, M.Sc. (TU Dresden)
Modellbasierte stochastische Analyse von Synchronisationsfehlern in Mechatronischen Systemen - Dienstag, 21. Mai 2019, 15:00 Uhr, ID 2/553
Sarmilan Sri Ramanan, B.Sc. (Masterarbeit - ATP, RUB)
Beobachterentwurf und experimentelle Erprobung einer vernetzten Steuerung am Handling System HANS - Dienstag, 28. Mai 2019, 15:00 Uhr, ID 2/553
Ozan Kart, B.Sc. (Masterarbeit - ATP, RUB)
Modellbildung, Parameteridentifikation und Regelung des Temperaturverhaltens eines Kochmixers - Dienstag, 10. September 2019, 15:00 Uhr, ID 2/553
Fabian Hörst (Bachelorarbeit - ATP, RUB)
Entwurf eines Positionsreglers für ein modulares Transportsystem
Einladung zum Kolloquium Automatisierungstechnik
Marcel Wallner, B.Sc. (ATP, RUB) sprach über das Thema:
Kooperation vernetzter Systeme zur Kompensation von Aktorausfällen
Das Ziel dieser Masterarbeit ist der Entwurf einer Methode zur fehlertoleranten Steuerung vernetzter Systeme. Ausgangspunkt für die Betrachtungen sind Regelstrecken, die nicht als zentrales System, sondern als Verbund physikalisch verkoppelter und digital vernetzter Teilsysteme dargestellt werden. Der durch die digitale Vernetzung der Teilsysteme ermöglichte Informationsaustausch zwischen den Teilsystemen wird genutzt, um durch eine Kooperation der Teilsysteme ein gemeinsames Regelungsziel zu sichern. Das gemeinsame Ziel wird erreicht, wenn jedes Teilsystem sein lokales Regelungsziel erfüllt. Sowohl das gemeinsame Ziel, als auch die lokalen Ziele sind durch die Forderung nach Trajektorienfolge der Ausgangsgrößen gegeben. Als Grundlage für das Erreichen der Regelungsziele dient ein bereits erfolgreich erprobtes Verfahren zur vernetzten, flachheitsbasierten Trajektorienfolge.
Das gegebene Verfahren wird im Rahmen dieser Arbeit insofern erweitert, als dass die digitale Vernetzung und physikalische Verkopplung der Teilsysteme aktiv genutzt werden, um den Einfluss eines Aktorausfalls in einem Teilsystem auf das gemeinsame Ziel zu kompensieren. Die Koppelsignale einzelner Teilsysteme werden dabei als virtuelle Stellgrößen für das fehlerhafte Teilsystem genutzt. Das gemeinsame Regelungsziel wird anschließend durch eine Rekonfiguration der lokalen Regelungsziele gesichert. Es zeigt sich, dass sich Bedingungen an die Kopplungen ergeben, welche die Wahl potentieller, virtueller Stellgrößen einschränken.
Als Beispiel für einen Verbund physikalisch verkoppelter Teilsysteme wird ein Transportprozess untersucht. Aus der Modellbildung folgt, dass das Transportband als schaltendes System betrachtet werden muss. Die erarbeitete Rekonfigurationsmethode wird entsprechend erweitert und abschließend in MATLAB/Simulink verifiziert.
Ort: Gebäude ID, Etage 2, Raum 553
Termin: Dienstag, 30. April 2019, 15:00 Uhr

Einladung zum Kolloquium Automatisierungstechnik
Thomas Mutzke, M.Sc. (TU Dresden) sprach über das Thema:
Modellbasierte stochastische Analyse von
Synchronisationsfehlern
in Mechatronischen Systemen
Die modellbasierte Systementwicklung ermöglicht die Analyse und Verifikation des Systemverhaltens in frühen Phasen der Produktentwicklung. Eine Herausforderung bei der Entwicklung mechatronischer Systeme ist die Verifikation von Zuverlässigkeitseigenschaften. In modernen mechatronischen Systemen treten typischerweise konkurrierende Prozesse auf. Fehler im zeitlichen Ablauf, verursacht durch mangelnde Synchronisationsmechanismen, können zu Fehlerzuständen führen und die Zuverlässigkeit beeinträchtigen. Verteilte Komponenten kommunizieren typischerweise über ein Netzwerk, in dem stochastische Effekte wie Verzögerungen bei der Übertragung auftreten können. In diesem Beitrag wird ein methodisches Vorgehen für die modellbasierte Analyse von zeitlichen Anforderungen in Systemen mit konkurrierenden Prozessen, basierend auf einem annotierten Basismodell welches den Datenund Steuerfluss umfasst, vorgestellt.
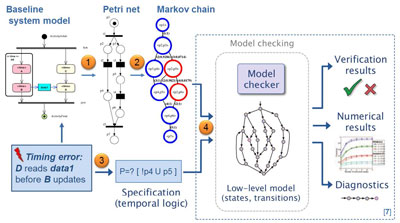
Abbildung 1: Modellbasierte stochastische Analyse von Synchronisationsfehlern
Als Basismodell wird beispielhaft ein SysML Aktivitätsdiagramm verwendet. SysML Aktivitätsdiagramme erlauben die Modellierung von Abläufen in unterschiedlichen Domänen, sind aber aufgrund der semi-formalen Semantik interpretierbar. Die Anwendbarkeit der vorgestellten Methode wird an einem Fallbeispiel aus der Medizintechnik, einer mobilen Patientenliege, demonstriert.
Ort: Gebäude ID, Etage 03, Raum 401
Termin: Dienstag, 07. Mai 2019, 15:00 Uhr
Einladung zum Kolloquium Automatisierungstechnik
Sarmilan Sri Ramanan, B.Sc. (ATP, RUB) sprach über das Thema:
Beobachterentwurf und experimentelle Erprobung einer vernetzten Steuerung
am Handling System HANS
Die vorliegende Arbeit befasst sich mit den Methoden zur kooperativen Zustandsregelung von vernetzten ereignisdiskreten Systemen. Ein vernetztes ereignisdiskretes System besteht aus einem Verbund von lokal geregelten Teilsystemen. Diese können autonome und kooperative Aufgaben lösen, wobei für letztere Informationen über ein digitales Netzwerk ausgetauscht werden. Das Ziel dieser Masterarbeit ist es eine bereits implementierte kooperative Zustandsregelung am Handling System HANS experimentell zu erproben. Hierfür wird die Anlage in vier Teilsysteme unterteilt und die bestehenden physikalischen Kopplungen zwischen den Teilsystemen genutzt, um kooperative Aufgaben in Form von synchronen Zustandsübergängen zu modellieren. Um zu gewährleisten, dass synchrone Zustandsübergänge an der realen Anlage gleichzeitig durchgeführt werden, wird eine Trigger-Einheit entworfen und die gegebene Regelung damit erweitert. Anschließend wird die erweiterte Zustandsregelung anhand eines Erprobungsprozesses am Handling System HANS untersucht.
Ort: Gebäude ID, Etage 2, Raum 553
Termin: Dienstag, 21. Mai 2019, 15:00 Uhr
Einladung zum Kolloquium Automatisierungstechnik
Ozan Kart, B.Sc. (ATP, RUB) sprach über das Thema:
Modellbildung, Parameteridentifikation und Regelung des Temperaturverhaltens
eines Kochmixers
Beim Heizen in einem Kochmixer (Vorwerk Thermomix TM6) geht es in erster Linie darum, während des Kochablaufs eine genaue Temperaturregelung zu ermöglichen, um einerseits den Geschmack zu erhalten und andererseits das Anbrennen oder Überkochen zu vermeiden. So wird durch die Komplexität des in dieser Arbeit betrachteten Kochmixers eine Temperaturregelung erschwert, da eine direkte Messung der Lebensmitteltemperatur nicht möglich ist.
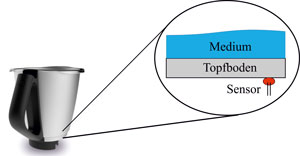
Abbildung 1.1: Darstellung des unteren Bereichs vom Kochtopf, bei der das Medium
vom Temperatursensor
durch den Topfboden getrennt wird.
Der verwendete Sensor wird an die Unterseite des Kochtopfes angebracht und ist lediglich in der Lage die Temperatur des Topfbodens und nicht des Lebensmittels anzugeben. Das Ziel dieser Arbeit besteht darin, ein Vorgehen zu erarbeiten, mit dem die Lebensmitteltemperatur zur Laufzeit (online) bestimmt werden kann. Eine Möglichkeit zur Ermittlung der Temperatur des Mediums in dem Topf besteht darin, mit Hilfe des bekannten Eingang-Ausgang-Verhaltens einen Zustandsschätzer wie den Luenberger-Beobachter zu entwerfen. Dieser setzt voraus, dass das Modell des Temperaturverhaltens des Kochmixers bekannt ist. Somit liegt der Fokus dieser Arbeit zunächst in der Modellbildung. Dafür ist es ausreichend, den Kochtopf als ein eigenes Gesamtsystem zu betrachten, in Teilkomponente zu zerlegen und deren Wärmeeinflüsse zu beschreiben. Ein weiterer Schritt ist die Parameteridentifikation. Die Modellparameter können sowohl durch vorhandene Material- und Naturkonstanten berechnet oder durch gezielte Versuche an dem System ermittelt werden. Einige Parameter sind jedoch abhängig von der Masse des Mediums. In dieser Arbeit handelt sich bei dem Medium um Wasser. Alle Kenntnisse basieren daher auf Untersuchungen mit Wasser. Für eine erfolgreiche Zustandsschätzung ist folglich notwendig zu wissen, wie viel Wasser erhitzt wird. Daher muss zunächst die Masse online geschätzt werden. Dafür wird die Partikel Schwarm Optimierung näher betrachtet. Anhand dieser Informationen kann die Mediumtemperatur mit dem Beobachter zur Laufzeit geschätzt werden.
Ort: Gebäude ID, Etage 2, Raum 553
Termin: Dienstag, 28. Mai 2019, 15:00 Uhr
Einladung zum Bachelor-Kolloquium Automatisierungstechnik
Fabian Hörst (ATP, RUB) sprach über das Thema:
Entwurf eines Positionsreglers für ein modulares Transportsystem
Am Lehrstuhl für Automatisierungstechnik und Prozessinformatik (ATP) wird zurzeit ein neuer Versuchsstand mit dem Namen "CoCo" (Cooperative Control) in Betrieb genommen. Der Versuchsstand besteht aus 50 Linearmotoren, auch Aktoren genannt, und soll ein modulares Transportband ergeben. Die Linearmotoren werden dabei als autonom agierende Systeme betrachtet. Hierbei sollen die autonomen Systeme als übergeordnete Aufgabe eine Kugel entlang einer gewünschten Trajektorie bewegen. In den vergangenen Jahren sind bereits mehrere theoretische Untersuchungen zur Trajektorienplanung, Aufgabenverteilung und dem Entwurf vernetzter Vorsteuerungen für diesen Versuchsstand entstanden. Diese Arbeiten erfordern ein exaktes Modell der Regelstrecke und können aufgrund der fehlenden Rückführung nicht auf Störungen reagieren. Dies motiviert diesen Beitrag, in der ein Positionsregler für das modulare Transportband entworfen wird. Hierbei wird eine Kugel auf dem modularen Transportsystem betrachtet, deren Position in einem gewünschten Arbeitspunkt stabilisiert wird. Da das modulare Transportband aus 50 Aktoren besteht, die alle geregelt werden müssen um das gewünschte Ziel zu erreichen, liegt der Fokus vor allem auf der Reduzierung der Stellgrößen des Reglers. Es wird gezeigt, wie sich die Stellgrößen des Reglers durch Beschränkung der Aktoren auf eine Ebene reduzieren lassen, sowie das Modell der Kugel auf dem Transportband gebildet, sodass ein geschlossener Regelkreis entsteht. Die Ergebnisse werden abschließend in MATLAB verifiziert.
Ort: Gebäude ID, Etage 2, Raum 553
Termin: Dienstag, 10. September 2019, 15:00 Uhr